Abstract
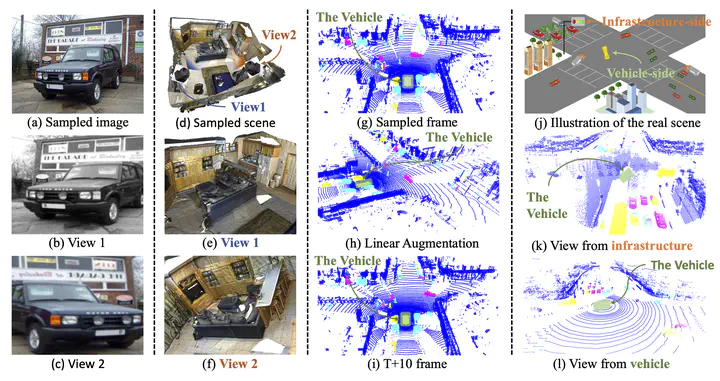
Unsupervised contrastive learning for indoor-scene point clouds has achieved great successes. However, unsupervised learning point clouds in outdoor scenes remains challenging because previous methods need to reconstruct the whole scene and capture partial views for the contrastive objective. This is infeasible in outdoor scenes with moving objects, obstacles, and sensors. In this paper, we propose CO^3, namely Cooperative Contrastive Learning and Contextual Shape Prediction, to learn 3D representation for outdoor-scene point clouds in an unsupervised manner. CO^3 has several merits compared to existing methods. (1) It utilizes LiDAR point clouds from vehicle-side and infrastructure-side to build views that differ enough but meanwhile maintain common semantic information for contrastive learning, which are more appropriate than views built by previous methods. (2) Alongside the contrastive objective, shape context prediction is proposed as pre-training goal and brings more task-relevant information for unsupervised 3D point cloud representation learning, which are beneficial when transferring the learned representation to downstream detection tasks. (3) As compared to previous methods, representation learned by CO^3 is able to be transferred to different outdoor scene dataset collected by different type of LiDAR sensors. (4) CO^3 improves current state-of-the-art methods on both Once and KITTI datasets by up to 2.58 mAP. Codes and models will be released. We believe CO^3 will facilitate understanding LiDAR point clouds in outdoor scene.